Hi! I’m Baoxiong, a research scientist at BIGAI. I received my Ph.D in the Department of Computer Science, University of California, Los Angeles. My research interests lie in the intersection of computer vision, artificial intelligence and cognitive science, with a special focus on spatial/temporal reasoning and its application to acting and planning in real world (scene/activity understanding, future prediction, grounded manipulation, etc.). Previously, I obtained my M.S. from UCLA in 2019 and B.S. from Peking University in 2018.
Info: Email / Google Scholar / CV /
News New Invited tutorial at EIS 2025 hosted by ACM SIGEMBED China, checkout the slides ! New Invited talk at EAIRCon 2025 on 3D Gaussian World Models, checktout the slides ! New SceneWeaver receives the Best Paper at RoboGen@IROS25 , checkout the slides and talk (EN) ! New We won the first place at the IROS 25 UniTree Dancing Challenge! New RoboVerse receives the Best Open-source Award at RoboGen@IROS25 ! 2025/10 Invited talk at HKU and 3DCVer on UniFP and COLA , checktout the slides and talk (CN) ! 2025/09 UniFP receives the Best Paper Award at CoRL 2025! Oral talk available here ! 2025/09 One paper on Agentic 3D Scene Generation is accepted by NeurIPS 2025. 2025/08 We won the of humanoid dancing champion at World Humanoid Robot Games (WHRG) ! 2025/06 One paper on Unified Force and Position Control is accepted by CoRL 2025 as Oral ! 2025/06 Two papers on 4D World Model and Embodied Vision Language are accepted by ICCV 2025! 2025/06 I’m co-organizing the 5th 3D Scene Understanding workshop at CVPR 2025. See you in Nashvile! 2025/04 RoboVerse is accepted by RSS 2025! Go check it out here ! 2025/03 I recently gave a summary of our work at BostonDynamics. Checktout the slides ! 2025/02 Four papers on 3D Scene Understanding and Reconstruction are accepted by CVPR 2025! 2025/01 Two papers on Mobile Manipulation and Articulated Part Generation are accepted by ICRA 2025! 2025/01 One paper on Articulated Object Reconstruction is accepted by ICLR 2025! SceneWeaver: All-in-One 3D Scene Synthesis with an Extensible and Self-Reflective Agent Advances in Neural Information Processing Systems (NeurIPS) 2025 (RoboGen@IROS 2025 Best Paper Award (* indicates equal contribution. # indicates corresponding author.)
Learning Unified Force and Position Control for Legged Loco-Manipulation Conference on Robot Learning (CoRL) 2025 (Best Paper Award (* indicates equal contribution. # indicates corresponding author.)
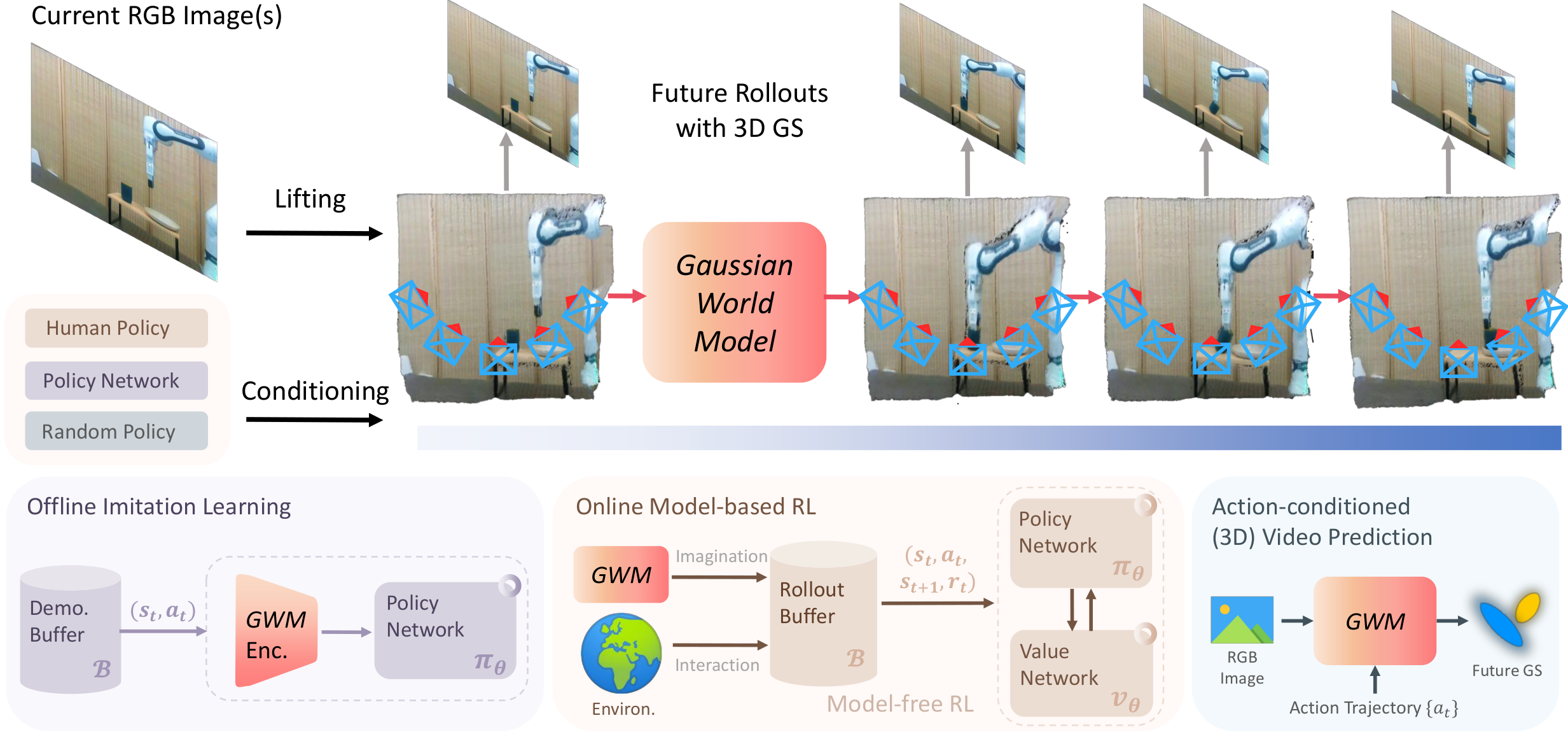
GWM: Toward Scalable Gaussian World Models for Robotic Manipulation International Conference on Computer Vision (ICCV) 2025 (* indicates equal contribution. # indicates corresponding author.)
MetaScenes: Towards Automated Replica Creation for Real-world 3D Scans Huangyue Yu* ,
Baoxiong Jia* ,
Yixin Chen* ,
Yandan Yang ,
Puhao Li ,
Rongpeng Su ,
Jiaxin Li ,
Qing Li ,
Wei Liang ,
Song-Chun Zhu ,
Tengyu Liu ,
Siyuan Huang .
IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2025 (* indicates equal contribution.)
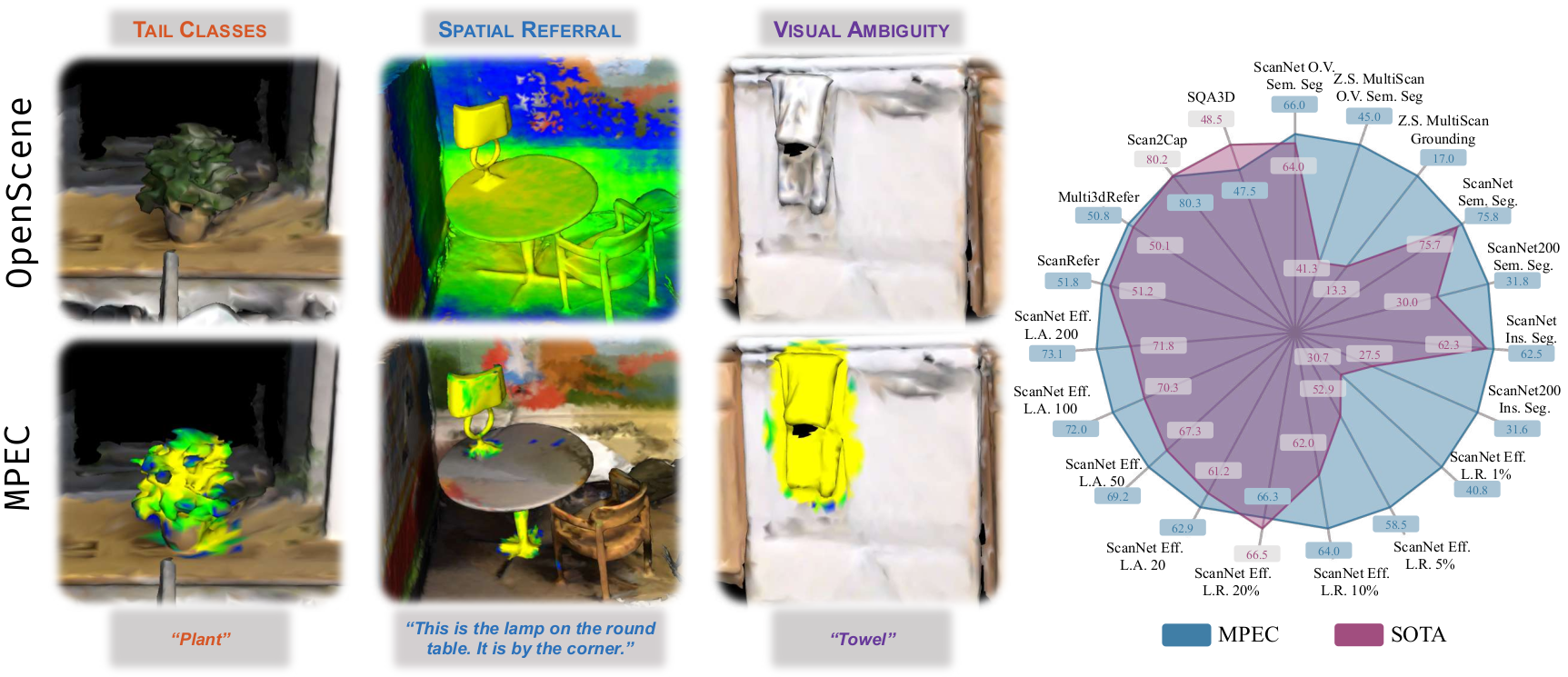
Unveiling the Mist over 3D Vision-Language Understanding: Object-centric Evaluation with Chain-of-Analysis IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2025 (* indicates equal contribution.)
Masked Point-Entity Contrast for Open-Vocabulary 3D Scene Understanding IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2025 (* indicates equal contribution.)
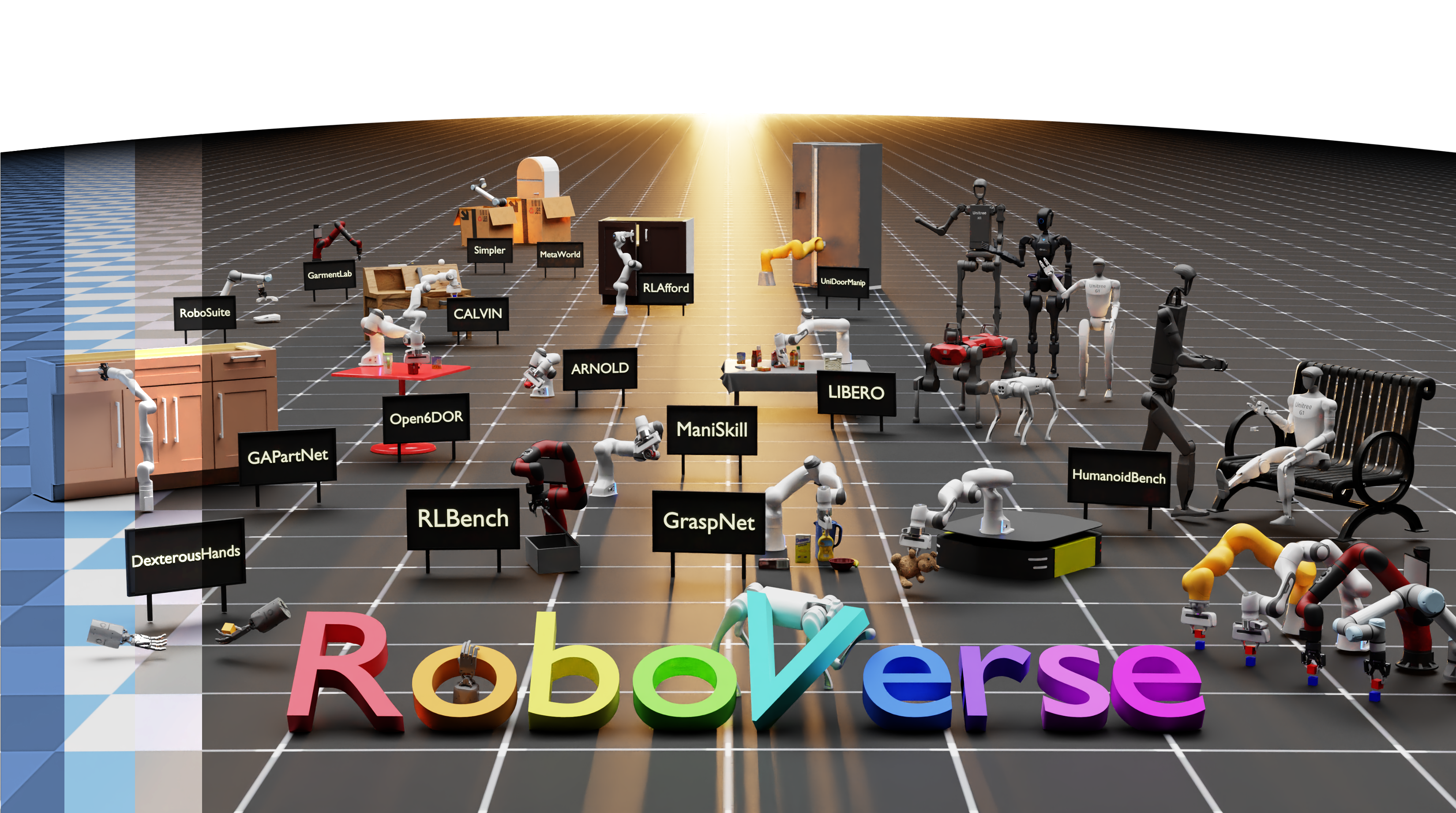
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning Haoran Geng* ,
Feishi Wang* ,
Songlin Wei* ,
Yuyang Li* ,
Bangjun Wang* ,
Boshi An* ,
Charlie Tianyue Cheng* ,
Haozhe Lou ,
Peihao Li ,
Yen-Jen Wang ,
Yutong Liang ,
Dylan Goetting ,
Chaoyi Xu ,
Haozhe Chen ,
Yuxi Qian ,
Yiran Geng ,
Jiageng Mao ,
Weikang Wan ,
Mingtong Zhang ,
Jiangran Lyu ,
Siheng Zhao ,
Jiazhao Zhang ,
Jialiang Zhang ,
Chengyang Zhao ,
Haoran Lu ,
Yufei Ding ,
Ran Gong ,
Yuran Wang ,
Yuxuan Kuang ,
Ruihai Wu ,
Baoxiong Jia ,
Carlo Sferrazza ,
Hao Dong ,
Siyuan Huang# ,
Yue Wang# ,
Jitendra Malik# ,
Pieter Abbeel# .
Robotics Science and Systems (RSS) 2025 (RoboGen@IROS2 2025 Best Open-source Award (* indicates equal contribution.)
Buliding Interactable Replicas of Complex Articulated Objects via Gaussian Splatting International Conference on Learning Representations (ICLR) 2025 (* indicates equal contribution.)
Closed-Loop Open-Vocabulary Mobile Manipulation with GPT-4V International Conference on Robotics and Automation (ICRA) 2025 (* indicates equal contribution. # indicates corresponding author.)
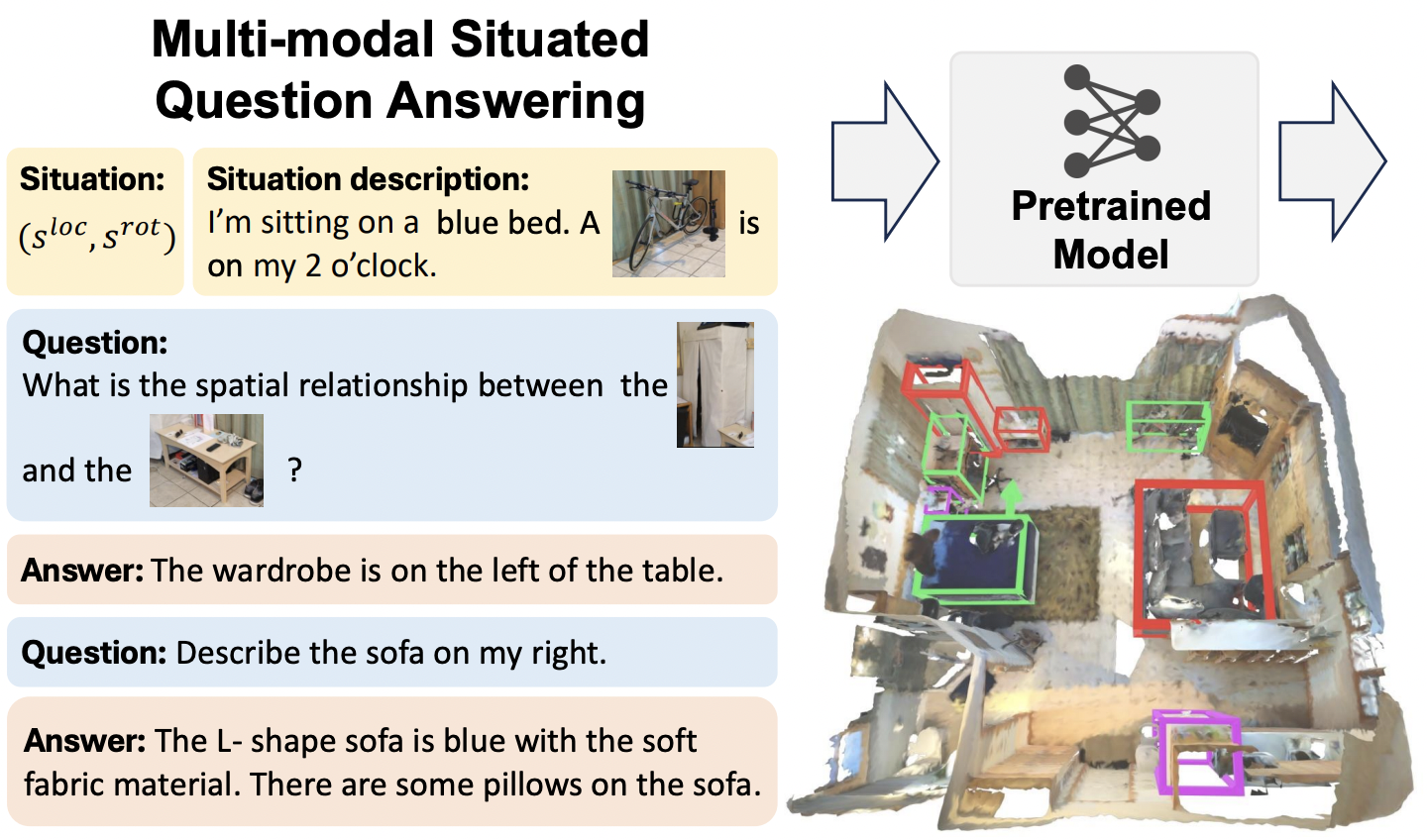
MSR3D: Multi-modal Situated Reasoning in 3D Scenes Advances in Neural Information Processing Systems (NeurIPS) 2024 (* indicates equal contribution. # indicates corresponding author.)
SceneVerse: Scaling 3D Vision-Language Learning for Grounded Scene Understanding European Conference on Computer Vision (ECCV) 2024 OpenSUN3D @ ECCV 2024 (* indicates equal contribution)
SlotLifter: Slot-guided Feature Lifting for Learning Object-centric Radiance Fields European Conference on Computer Vision (ECCV) 2024 Wild3D @ ECCV 2024 (* indicates equal contribution.)
An Embodied Generalist Agent in 3D World International Conference on Machine Learning (ICML) 2024 GenAI4DM & AGI @ ICLR 2024 (* indicates equal contribution.)
PhyScene: Physically Interactable 3D Scene Synthesis for Embodied AI Conference on Computer Vision and Pattern Recognition (CVPR) 2024 (Highlight AI3DG @ CVPR 2024 (* indicates equal contribution.)
Move as You Say, Interact as You Can: Language-guided Human Motion Generation with Scene Affordance Conference on Computer Vision and Pattern Recognition (CVPR) 2024 (Highlight HuMoGen @ CVPR 2024